库卡机器人ptp指令【附图】
PTP运动方式是时间最快,也是最优化的移动方式。在KPL程序中,机器人的第一个指令必须是PTP或SPTP,因为机器人控制系统仅在PTP或SPTP运动时才会考虑编程设置的状态和转角方向值,以便定义一个唯一的起始位置。KUKA库卡机器人编程指令有很多,如何记住并且熟练应用这些指令,是一个KUKA库卡机器人操作员的基本功,由于指令较多,将分为2大部分为大家分享,下面是一部分的ptp指令编程指令,希望对您的学习给予帮助。
(1)创建PTP运动的前提条件是机器人的运动方式已经设置为T1运行方式,并且已经选定机器人程序。
(2)操作机器人将TCP移向应被设为目标点的位置。
(3)然后将光标放置在其后应添加运动指令的那一行程序中。
(4)点击菜单序列指令>运动>PTP,作为选项,也可以在相应行中按下软件运动,选完运动指令后,出现PTP指令的联机表单。
(5)在联机表单中输入参数。
(6)在选项窗口“坐标系”中输入工具和基坐标系的正确数据,以及关于插补模式的数据和碰撞监控的数据。
机器人的TCP以较快的速度运动到目标点,这种运动叫做机器人的PTP运动。因为库卡机器人的轴是旋转运动的,所以弧形轨迹比直线轨迹更快。运动的具体过程是不可预见的。在程序中的个体运动必须是PTP运动,因为只有在此运动中才评估状态和转向。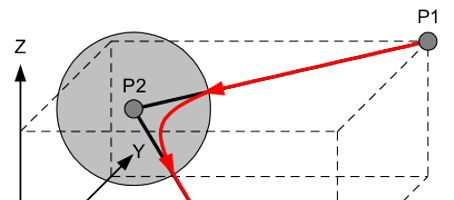
为了加速运动过程,控制器可以 CONT 标示的运动指令进行轨迹逼近。轨迹逼近意味着将不移到点坐标。事先便离开保持轮廓的轨迹。TCP 被导引沿着轨迹逼近轮廓运行,该轮廓止于下一个运动指令的保持轮廓。
使用轨迹逼近的优点:
1.减少机器的磨损
2.降低节拍时间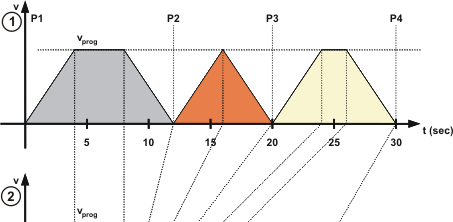
如何创建PTP运动:
1.设置运行方式T1,机器人程序已选定
2.TCP依序移向被示教为目标点的位置
3.将光标置于其后应添加运动指令的行中
4.选择菜单序列“指令”→“运动”→“PTP”
5.在编辑好的行中,出现表格,如下图所示
1.运动方式选择PTP运动
2.目标点名称为P1
3.CONT:目标点被轨迹逼近; 空白:将地移至目标点
4.速度范围,PTP运动的速度范围为:1%-100%
5.数据组变量名称
6.在选项窗口Frames中输入工具和基坐标系的正确数据,以及关于插补模式的数据和碰撞监控的数据。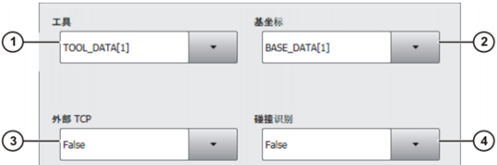
7. 在运动参数选项窗口中可将加速度从最大值降下来。如果已经激活轨迹逼近,则也可更改轨迹逼近距离。根据配置的不同,该距离的单位可以设置为mm或%。其参数说明见下表。
8. 单击“OK”键存储指令,TCP的当前位置被作为目标示教。如下图所示。