码垛机器人编程教程【完整版】
4.0.1 编辑工件界面
码垛机器人操作的编辑工件界面如图 4.46 所示。对创建码垛机器人操所操作的工件,只需导入一个工件模型在创建操作时选择该模型创建,在编辑工件窗口中为默认该工件,可对工件进行布局,设置工具方向个数,相对间距,则可对工件进行布局。
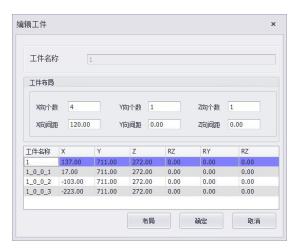
图 4.46 码垛机器人编辑工件
码垛机器人路径界面
码垛机器人操作的编辑路径界面如图 4.46 所示。码垛机器人路径界面分操作名称,工具名称,取料方式,方阵取料方式或传送带取料方式,过渡点,放料信息,趋近点回退点坐标设置,以及生成路径,运动仿真。

图 4.46 码垛机器人路径设置界面
运动仿真界面
与示教操作的运动仿真界面一样,参考 4.8.3 小节。
代码输出界面
与示教操作的代码输出界面一样,参考 4.8.4 小节。
离线编程操作说明
工业机器人库功能
导入工业机器人
启动 InteRobot2018 工业机器人离线编程软件,选择工业机器人离线编程模块,进入模块后,左边出现导航树,选择工作站导航树。工作站导航树上默认有工作站根节点,以及其三个子节点,分别是工业机器人组、工作坐标系组、工序组。用户用鼠标左键点击工业机器人组节点,选中该节点,【工业机器人库】菜单就会变为可用状态。然后点击菜单栏中的【工业机器人库】菜单,如图 2-10 所示。点击工业机器人库菜单后会弹出工业机器人库主界面。
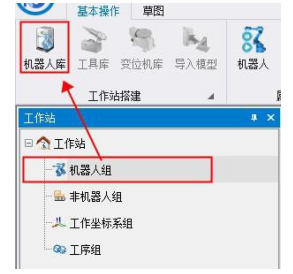
图 2-10 调出工业机器人库主界面
弹出工业机器人库主界面后,界面上列表中显示了所有在库的工业机器人参数,用户选择实际需要的工业机器人,在工业机器人预览窗口会显示相对应的工业机器人的图片,点击最下端的【导入】,【确定】,即可实现工业机器人的导入功能,如图 2-11 所示。

图 2-11 工业机器人导入操作
工业机器人导入完成后,视图窗口出现用户选中的工业机器人的模型,工作站导航树中在工业机器人组节点下创建了工业机器人的节点,与用户选中的工业机器人名称一致,这样工业机器人的所有参数信息就导入到了当前工程文件中,如图 2-12 所示。
新建工业机器人
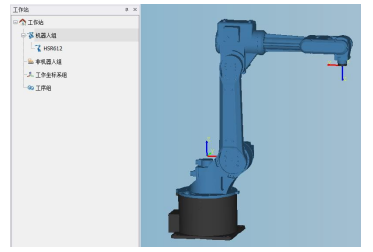
图 2-12 工业机器人导入完成
在工业机器人库主界面中点击新建按钮,弹出新建工业机器人的界面,如图 2-1 所示。界面的所有参数都是空白或者是默认的初始参数。
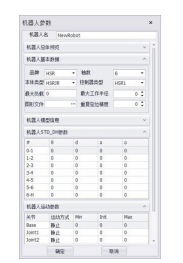
图 2-1 新建工业机器人界面的初始状态
在该界面中,用户需要设置工业机器人基本参数、定位坐标系和关节数据。其中工业机器人基本参数和关节数据是必须设置的项。
工业机器人基本数据设置包括工业机器人类型、轴数和缩略图文件。类型可以设置为
HSR1、HSR2、ABB、KUKA、FANUA、KAWASAKI 等类型。其它类型的工业机器人也可以进行定制。轴数目前只支持六轴工业机器人的创建。图形文件中点击省略号处,弹出文件选择对话框,选中预览图片,在预览窗口中就会显示出来,如图 2-2 所示。

图 2-2 工业机器人基本数据设置
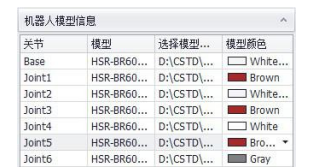
关节数据设置中包括三部分:模型信息、尺寸参数、运动参数。展开模型信息折叠栏,如图 2-3 所示,是未进行模型信息设置的初始状态。每个关节对应的选择模型文件一栏处,弹出模型文件选择框,选择好每个关节所对应的模型文件。
图 2-3 模型信息设置前
为了保持工业机器人导入后的模型合理,导入的关节的模型文件必须基于同一个基座标,因此在模型导入前,需要用三维软件(UG、Solidworks)把工业机器人的建模坐标移动至工业机器人基座底部,再依次导出工业机器人关节。
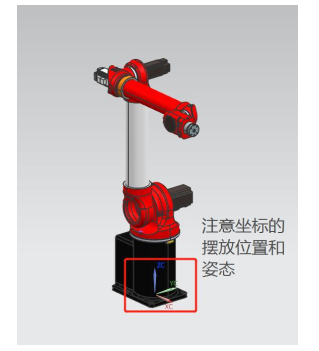
图 2-4 模型坐标设置
在选择关节模型后,系统会将对应的关节模型导入到视图界面中,当所有关节模型导入完成后,视图中会显示组装好的工业机器人整体模型,用户可以根据视图检查各个关节模型导入是否正确。如图 2-5 所示,工业机器人模型信息设置完成后的参数界面和视图界面。
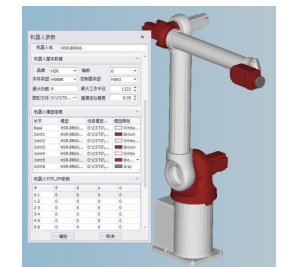
图 2-5 模型信息设置后
展开尺寸参数折叠栏,设置各个关节的长度信息。如图 2-6 所示,为设置完关节长度的状态。

图 2-6 设置尺寸参数
展开运动参数折叠栏,如图 2-7 所示,需要设置工业机器人各个关节的运动方式、运动方向、最小限位、最大限位、初始位置。运动方式有静止、旋转、平移三种方式。运动方向有 X+、X-、Y+、Y-、Z+、Z-。初始位置表示各个关节处于视图中姿态时对应的各个关节的实轴角度。如图 2-7 是设置好的工业机器人运动参数。

图 2-7 设置运动参数
当所有参数设置好后点击确定按钮,新建工业机器人就完成了。如图 2-8 所示, 新建完成后,工业机器人库主界面的列表中出现该新建的工业机器人。

扩展资料:
码垛机器人的工作原理和应用范围 :
码垛机器人的工作原理是根据他的码垛方式的不同而不同的,市场上目前用的码垛机器人一般有单层码垛机器人、多层码垛机器人和排列码垛机器人三种,它们的码垛方式不一样,工作原理也有一定的区别。总体上讲码垛机器人就是将产品按要求堆放的一种设备,所以根据达到的堆放要求不同工作原理也不同,松乐智能装备下面具体来讲一下码垛机器人的工作原理和应用范围。
一、单层码垛机器人工作原理
单层结构的码垛机器人是比较基本的,主要是靠输送带把物料输送过来,等到达转向机构的时候,可以根据规定的方向调整好,准备完毕后,可以进到层输机构上了。只要在这个地方把产品按设定的排列顺序进行紧密的排列可以了,再通过输送辊把排列好的产品移送到下一个工位,这样码垛机器人的堆码作业算完成了。
二、多层码垛机器人工作原理
有单层相应的肯定有多层,肯定要比单层码垛机器人复杂。我们可以看到多层码垛机器人的托送板是在输送带下面的,还是可以进行左右一定的。机器在进行堆码的时候,物料会在整齐的排列在托送板上,然后将托送板设置在载左极限位置。当输送带输送的物料被挡板挡住时,正好排列成一行。然后托送板右移,再像上面的步骤一样物料又会排成一行。以此类推,物料每增加一层,码垛机器人的升降台的高度会下降一层,直到将物料堆到一定高度后停止。
三、排列码垛机器人工作原理
这种码垛机器人是将物料排成排后进行输送的,推板会将输送来的物料放到集料台上。然后向左移动,从下往上推,将三层物料堆码在一起。在这个过程中,会有斜面装置保证过程的顺利完成,而且集料台的特殊性也会有助于码垛机器人完成堆码。这几种只是比较常见的码垛机器人。
四、码垛机器人应用范围
码垛机器人一般用于生产线的末端,把袋装、箱装、桶装等物料从生产线上按照已经设置好的规则码垛到托盘,再经叉车存放到仓库。根据不同的产品类型和实际需求,可以对码垛机器人进行编程,使其适应各类产品的码垛要求。




