富士康机器人编程指令【附图】
T指令手册:
HYPERLINK \l "_Toc167196600" ACCEL PAGEREF _Toc167196600 \h 1
HYPERLINK \l "_Toc167196601" CURPOS PAGEREF _Toc167196601 \h 1
HYPERLINK \l "_Toc167196602" DECEL PAGEREF _Toc167196602 \h 1
HYPERLINK \l "_Toc167196603" DEFIO PAGEREF _Toc167196603 \h 1
HYPERLINK \l "_Toc167196604" DEFPOS PAGEREF _Toc167196604 \h 2
HYPERLINK \l "_Toc167196605" DELAY PAGEREF _Toc167196605 \h 2
HYPERLINK \l "_Toc167196606" DEFJNT PAGEREF _Toc167196606 \h 2
HYPERLINK \l "_Toc167196607" DIST PAGEREF _Toc167196607 \h 2
HYPERLINK \l "_Toc167196608" DRIVE PAGEREF _Toc167196608 \h 3
HYPERLINK \l "_Toc167196609" DRIVEA PAGEREF _Toc167196609 \h 3
HYPERLINK \l "_Toc167196610" FIG PAGEREF _Toc167196610 \h 3
HYPERLINK \l "_Toc167196611" GOHOME PAGEREF _Toc167196611 \h 3
HYPERLINK \l "_Toc167196612" HOME PAGEREF _Toc167196612 \h 4
HYPERLINK \l "_Toc167196613" IN PAGEREF _Toc167196613 \h 4
HYPERLINK \l "_Toc167196614" J2P PAGEREF _Toc167196614 \h 5
HYPERLINK \l "_Toc167196615" MOVE PAGEREF _Toc167196615 \h 5
HYPERLINK \l "_Toc167196616" OUT PAGEREF _Toc167196616 \h 6
HYPERLINK \l "_Toc167196617" POSRX PAGEREF _Toc167196617 \h 7
HYPERLINK \l "_Toc167196618" POSRY PAGEREF _Toc167196618 \h 7
HYPERLINK \l "_Toc167196619" POSRZ PAGEREF _Toc167196619 \h 7
HYPERLINK \l "_Toc167196620" POSX PAGEREF _Toc167196620 \h 7
HYPERLINK \l "_Toc167196621" POSY PAGEREF _Toc167196621 \h 8
HYPERLINK \l "_Toc167196622" POSZ PAGEREF _Toc167196622 \h 8
HYPERLINK \l "_Toc167196623" RESETIO PAGEREF _Toc167196623 \h 8
HYPERLINK \l "_Toc167196612" HOME PAGEREF _Toc167196612 \h 4
HYPERLINK \l "_Toc167196613" IN PAGEREF _Toc167196613 \h 4
HYPERLINK \l "_Toc167196614" J2P PAGEREF _Toc167196614 \h 5
HYPERLINK \l "_Toc167196615" MOVE PAGEREF _Toc167196615 \h 5
HYPERLINK \l "_Toc167196616" OUT PAGEREF _Toc167196616 \h 6
HYPERLINK \l "_Toc167196617" POSRX PAGEREF _Toc167196617 \h 7
HYPERLINK \l "_Toc167196601" CURPOS PAGEREF _Toc167196601 \h 1
HYPERLINK \l "_Toc167196602" DECEL PAGEREF _Toc167196602 \h 1
HYPERLINK \l "_Toc167196603" DEFIO PAGEREF _Toc167196603 \h 1
HYPERLINK \l "_Toc167196604" DEFPOS PAGEREF _Toc167196604 \h 2
HYPERLINK \l "_Toc167196611" GOHOME PAGEREF _Toc167196611 \h 3
HYPERLINK \l "_Toc167196612" HOME PAGEREF _Toc167196612 \h 4
HYPERLINK \l "_Toc167196613" IN PAGEREF _Toc167196613 \h 4
HYPERLINK \l "_Toc167196614" J2P PAGEREF _Toc167196614 \h 5
HYPERLINK \l "_Toc167196615" MOVE PAGEREF _Toc167196615 \h 5
HYPERLINK \l "_Toc167196616" OUT PAGEREF _Toc167196616 \h 6
HYPERLINK \l "_Toc167196617" POSRX PAGEREF _Toc167196617 \h 7
HYPERLINK \l "_Toc167196618" POSRY PAGEREF _Toc167196618 \h 7
HYPERLINK \l "_Toc167196619" POSRZ PAGEREF _Toc167196619 \h 7
HYPERLINK \l "_Toc167196611" GOHOME PAGEREF _Toc167196611 \h 3
HYPERLINK \l "_Toc167196612" HOME PAGEREF _Toc167196612 \h 4
HYPERLINK \l "_Toc167196613" IN PAGEREF _Toc167196613 \h 4
HYPERLINK \l "_Toc167196614" J2P PAGEREF _Toc167196614 \h 5
HYPERLINK \l "_Toc167196615" MOVE PAGEREF _Toc167196615 \h 5
HYPERLINK \l "_Toc167196616" OUT PAGEREF _Toc167196616 \h 6
HYPERLINK \l "_Toc167196617" POSRX PAGEREF _Toc167196617 \h 7
HYPERLINK \l "_Toc167196618" POSRY PAGEREF _Toc167196618 \h 7
HYPERLINK \l "_Toc167196619" POSRZ PAGEREF _Toc167196619 \h 7
HYPERLINK \l "_Toc167196611" GOHOME PAGEREF _Toc167196611 \h 3
HYPERLINK \l "_Toc167196612" HOME PAGEREF _Toc167196612 \h 4
HYPERLINK \l "_Toc167196613" IN PAGEREF _Toc167196613 \h 4
HYPERLINK \l "_Toc167196614" J2P PAGEREF _Toc167196614 \h 5
HYPERLINK \l "_Toc167196615" MOVE PAGEREF _Toc167196615 \h 5
HYPERLINK \l "_Toc167196616" OUT PAGEREF _Toc167196616 \h 6
HYPERLINK \l "_Toc167196617" POSRX PAGEREF _Toc167196617 \h 7
HYPERLINK \l "_Toc167196618" POSRY PAGEREF _Toc167196618 \h 7
HYPERLINK \l "_Toc167196619" POSRZ PAGEREF _Toc167196619 \h 7
HYPERLINK \l "_Toc167196611" GOHOME PAGEREF _Toc167196611 \h 3
HYPERLINK \l "_Toc167196612" HOME PAGEREF _Toc167196612 \h 4
HYPERLINK \l "_Toc167196613" IN PAGEREF _Toc167196613 \h 4
HYPERLINK \l "_Toc167196614" J2P PAGEREF _Toc167196614 \h 5
HYPERLINK \l "_Toc167196615" MOVE PAGEREF _Toc167196615 \h 5
HYPERLINK \l "_Toc167196616" OUT PAGEREF _Toc167196616 \h 6
HYPERLINK \l "_Toc167196617" POSRX PAGEREF _Toc167196617 \h 7
HYPERLINK \l "_Toc167196618" POSRY PAGEREF _Toc167196618 \h 7
HYPERLINK \l "_Toc167196619" POSRZ PAGEREF _Toc167196619 \h 7
HYPERLINK \l "_Toc167196611" GOHOME PAGEREF _Toc167196611 \h 3
HYPERLINK \l "_Toc167196612" HOME PAGEREF _Toc167196612 \h 4
HYPERLINK \l "_Toc167196613" IN PAGEREF _Toc167196613 \h 4
HYPERLINK \l "_Toc167196614" J2P PAGEREF _Toc167196614 \h 5
HYPERLINK \l "_Toc167196615" MOVE PAGEREF _Toc167196615 \h 5
HYPERLINK \l "_Toc167196616" OUT PAGEREF _Toc167196616 \h 6
HYPERLINK \l "_Toc167196617" POSRX PAGEREF _Toc167196617 \h 7
HYPERLINK \l "_Toc167196618" POSRY PAGEREF _Toc167196618 \h 7
HYPERLINK \l "_Toc167196619" POSRZ PAGEREF _Toc167196619 \h 7
HYPERLINK \l "_Toc167196611" GOHOME PAGEREF _Toc167196611 \h 3
HYPERLINK \l "_Toc167196612" HOME PAGEREF _Toc167196612 \h 4
HYPERLINK \l "_Toc167196613" IN PAGEREF _Toc167196613 \h 4
HYPERLINK \l "_Toc167196614" J2P PAGEREF _Toc167196614 \h 5
HYPERLINK \l "_Toc167196615" MOVE PAGEREF _Toc167196615 \h 5
HYPERLINK \l "_Toc167196616" OUT PAGEREF _Toc167196616 \h 6
HYPERLINK \l "_Toc167196617" POSRX PAGEREF _Toc167196617 \h 7
HYPERLINK \l "_Toc167196618" POSRY PAGEREF _Toc167196618 \h 7
HYPERLINK \l "_Toc167196619" POSRZ PAGEREF _Toc167196619 \h 7
扩展资料:
工业机器人编程教程——逻辑编程:
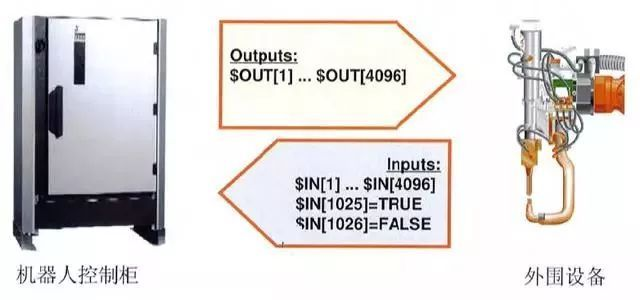
1、逻辑编程
输入输出的设置是为了机器人与外设设备的通信,例如工具传感器等。
2、可用逻辑指令
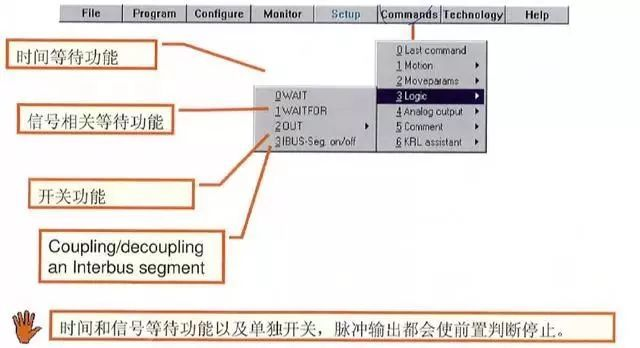
3、等待时间功能逻辑指令
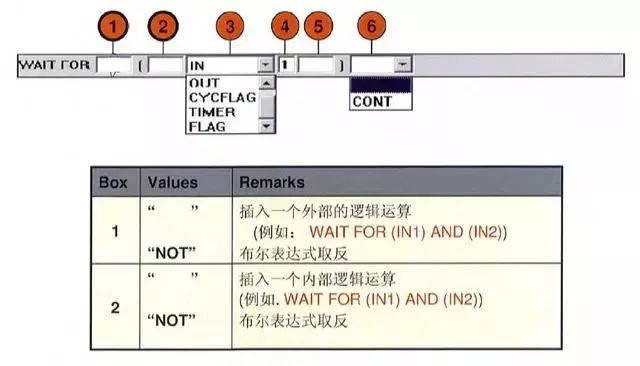
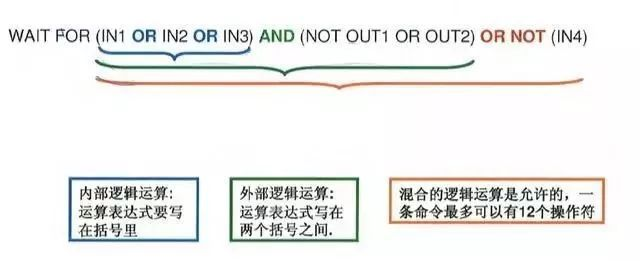
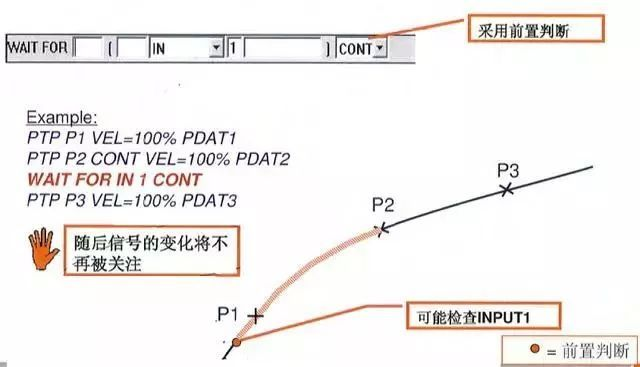
(1)等待信号程序可用编写,例如以下常用形式。
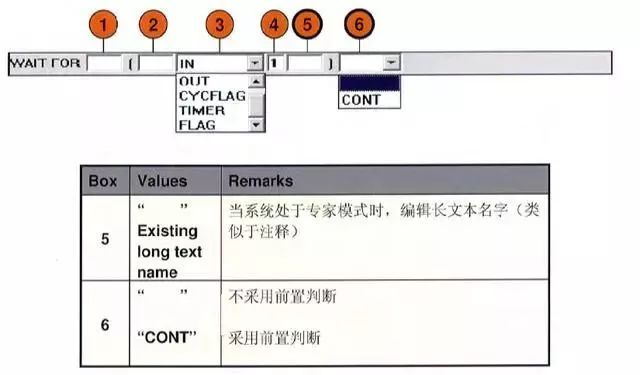
(2)如果“WAIT FOR”指令被选择,你们下列参数可以被设置
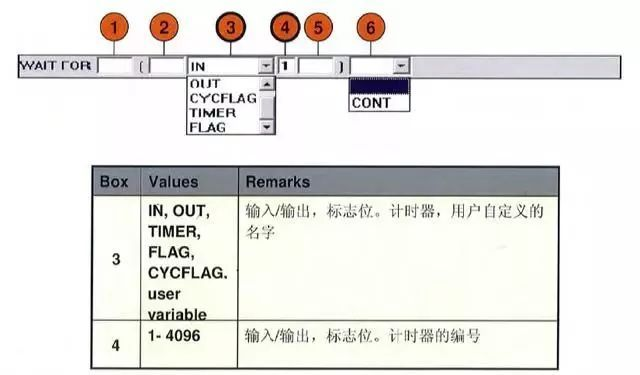
(3)如果“WAIT FOR”指令被选择,你们下列参数可以被设置
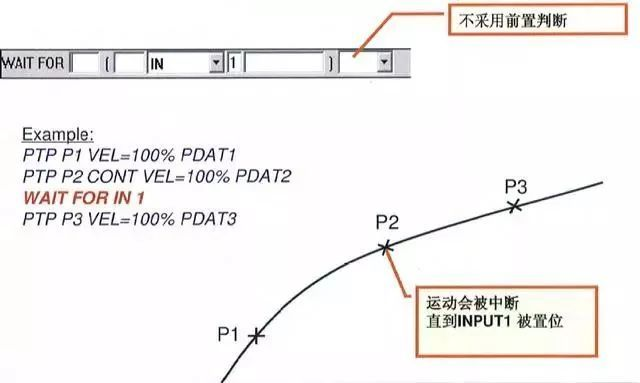
(4)如果“WAIT FOR”指令被采用打断前置判断的形式,每一个点都会精确达到即使条件已经满足。
(5)如果“WAIT FOR”指令选择CONT模式,你们条件将会被前置判断,如果条件满足,那么就会采用逼近方式。
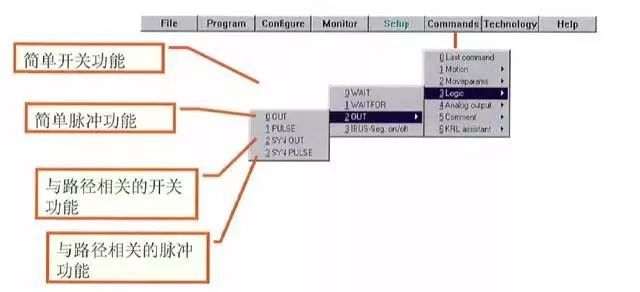
4、输出功能
(1)以下功能按选件可以被选择
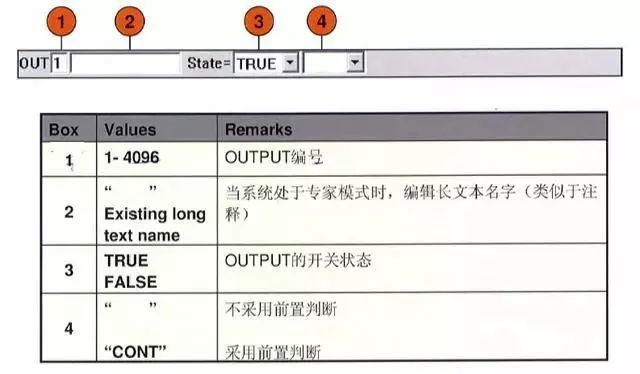
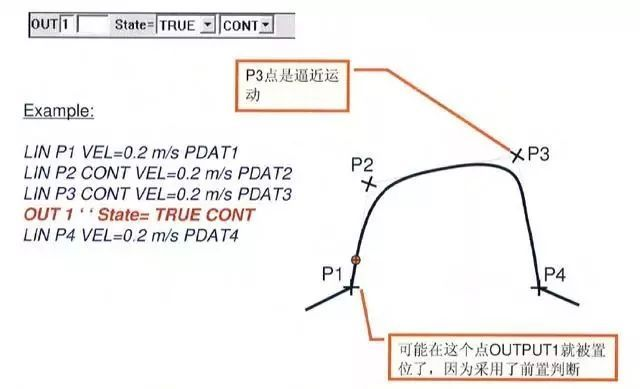
(2)简单输出指令一
如果“OUT"指令被选择,那么以下参数可以设置
(3)简单输出指令二
4)简单输出指令三
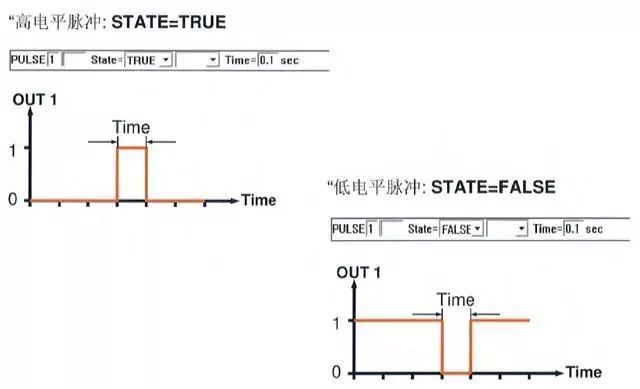
(5)、简单脉冲指令一
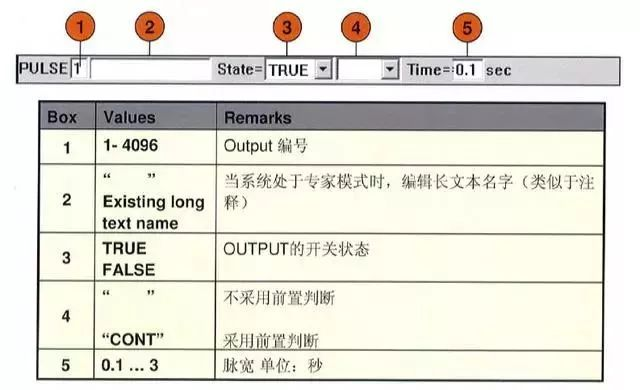
(6)简单脉冲指令二
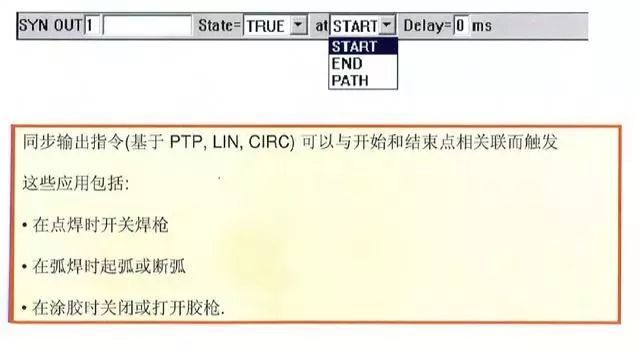
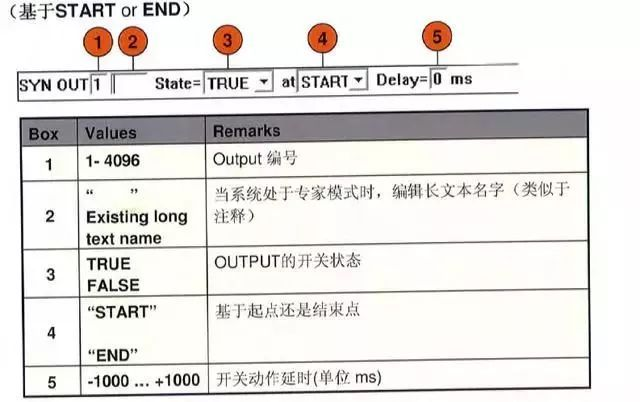
5、同步输出指令
6、信号输出
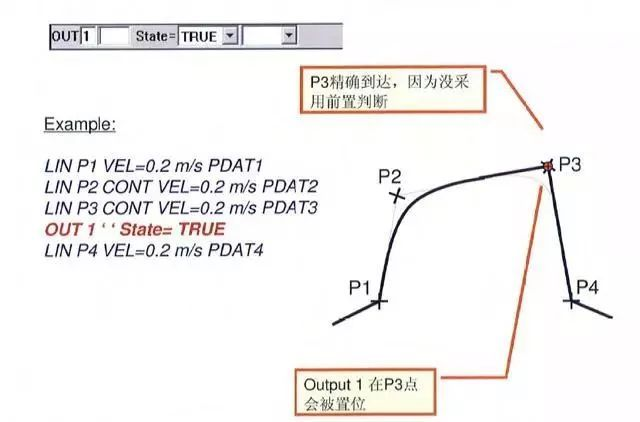
(1)在路径开始或者结束处输出信号一
如果"OUT"指令被选择,那么以下的参数可以设置
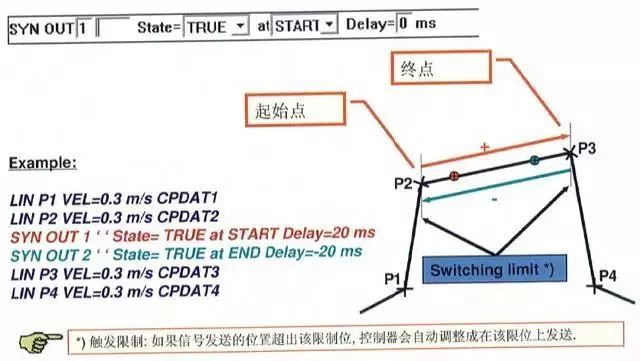
(2)起始点和结束点都精确到达
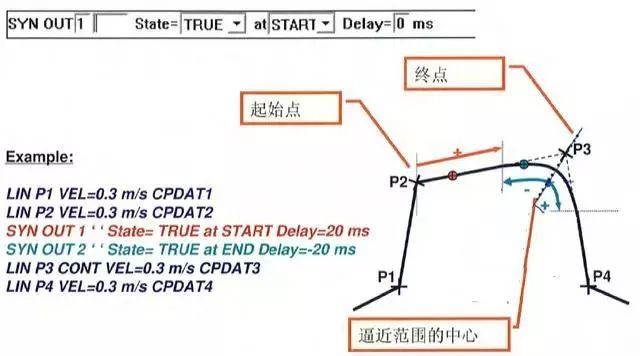
(3)起点精确到达点,终点是逼近点
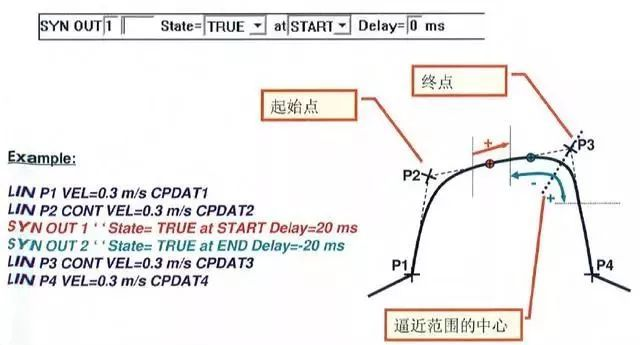
(4)起始点和结束点都逼近点
(5)在路径如何位置输出信号
a、如果你使用路径相关的SYNOUT-PATH命令,你可以沿着程序路径上的
知道距离的任意点触发开关量。
b、和起始结束点相关同步指令一样,这种指令也可以提前或者延迟发送
信号。
c、路径相关的开关量控制只是被允许用在连续路径运动中(LIN 或者 C
IRC)。
d、SYNOUT-PATH指令是针对下一个运动指令而言的。
e、如果一个SYNOUT-PATH命令运用于一个PTP运动,那么运动执行时会被
软件拒绝。
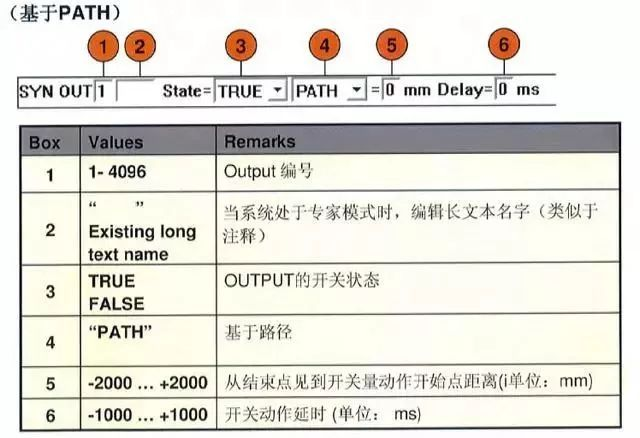
(6)路径相关同步输出指令一
如果“OUT”指令被选择,那么以下参数可以设置
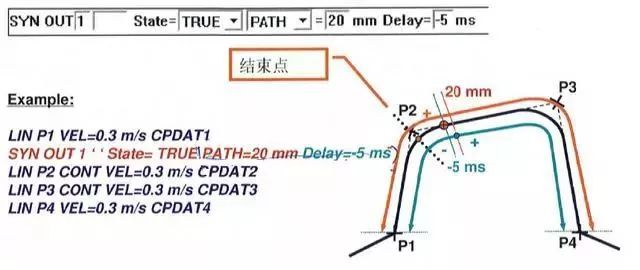
(7)路径相关同步输出指令二
起始点是精确到达点,终点是逼近点
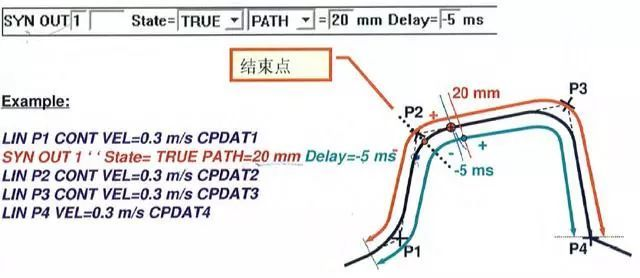
(8)路径相关同步输出指令三
起始的和结束点都是逼近点
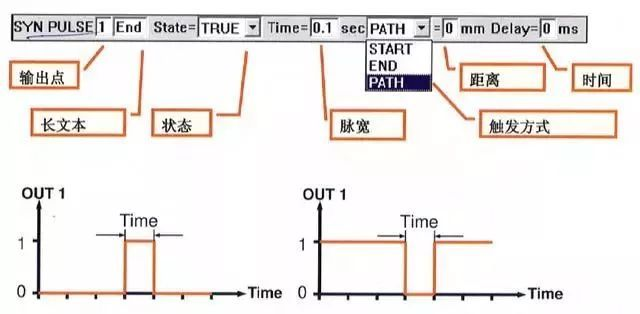
7、同步脉冲指令
如果“SYN PULSE”被选择,那么以下参数可以设置
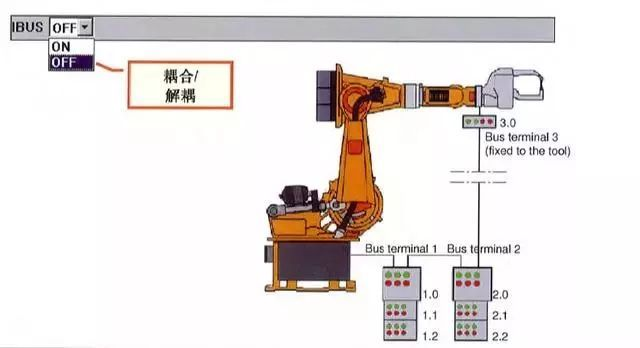
8、Inter bus 部分耦合和解耦
如果“IBUS-seg.on/off ”被选择,那么以下参数可以设置