六轴机械手控制方式与运动轨迹算法
而本文主要介绍的六轴机械手控制方式,就是基于PLC的控制器。在还未发展可编程逻辑控制器(简称PLC)之前,要达到自动化的功能需要依赖大量的继电器和计数器才能完成。PLC 的出现大大的简化了自动控制所需要的硬件空间。
PLC控制六轴机械手的方式
1、周期方式
①机械手在原位压左限位开关和上限位开关,按~次操作按钮则机械于开始下降,下降到左工位压动下限位开关后自停;
②机械手夹紧工件后开始上升,上升到原位压动上限位开关后自停;
③机械手开始右行直至压动右限位开关后自停;
④机械手下降,下降到右工位压动下限位开关(两个工位用一个下限位开关)后自停;
⑤机械手放松工件后开始上升,直至压动上限位开关后自停(两个工位用一个上限位开关);
⑥机械手开始左行,直至压动左限位开关后自停。至此一个周期的动作结束,再按一次操作按钮则开始下一个周期的运行。
2、连续方式
启动后机械手反复运行上述每个周期的动作过程,即周期性连续运行。
3、单步疗式
每按一次操作按钮,机械手完成一个工作步。例如,按一次操作按钮,机械手开始下降,下降到左工位压动下限位开关自停,欲使的运行下一个工作步,必须再按一次操作按钮。
六轴机械手运行轨迹算法
轨迹是一条制定了时间律的路径,即在一条路径中的每个位置时,每个控制自由度的关节的位置、速度和加速度的状态。
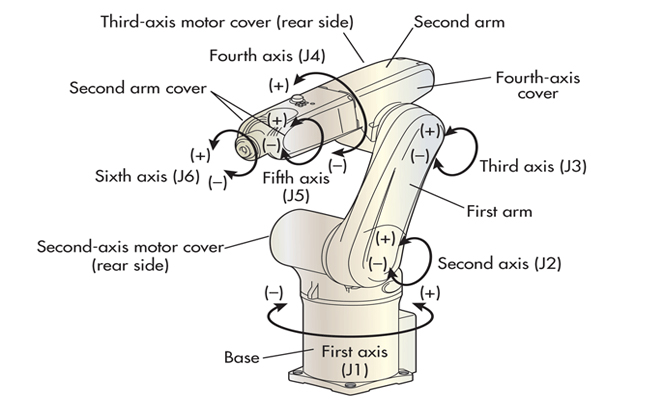
六轴机械手
轨迹规划就是根据预期的作业需求,考虑到路径描述、路径约束、机械手动力学对路径的约束,从而得到末端执行器按照时间顺序排列的有关位置、速度和加速度的值构成的轨迹。
轨迹规划算法就是预先规划一个机械手末端执行器在作业中的轨迹,为了更加精准地控制末端执行器在执行作业过程中的位姿,会再轨迹中添加若干个中间点,确定这些点的位姿。再添加这些新的约束以后,找到一条满足所有约束的轨迹。
六轴机械手的控制是通过在关节空间中控制各关节的角度完成的,所以应当使用逆运动学方法,将空间上的轨迹转化为各个关节的一组随时间变化的关节角。从而实现对机械手轨迹规划的基本要求。更多关于六轴机械手的控制方式和运动轨迹的算法。
这里是一段可以自定义编辑的内容




