abb机器人轨迹编程【干货】
利用已搭建好的仿真工作站和ABB机器人系统,建立好例行程序后,编写机器人程序。
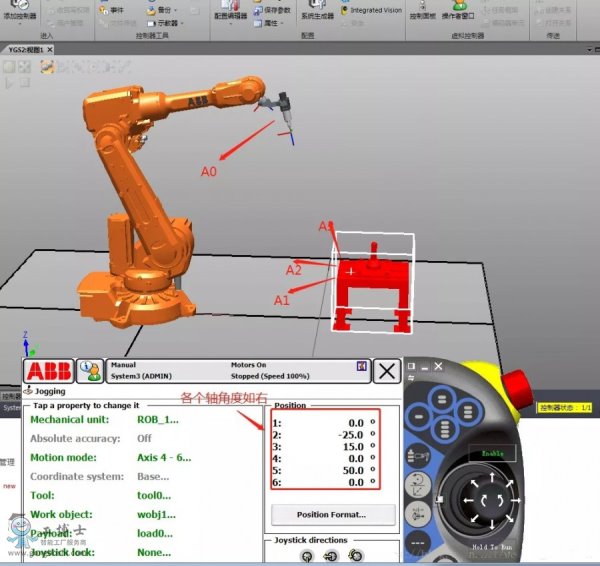
完成机器人从A0到A1点,再经过A2点到达A3点,*后回到A0点这样的运动过程。
其中P0点作为机器人运动的起点,它要求机器人6轴的角度分别为0°,-25°,15°,0°,50°,0°,而且A1,A2,A3三点在同一条直线上,该直线就是下图所示桌子的一条边,A1,A3是桌子的两个顶点。
从程序编辑器打开已创建好的例行程序r1,选择SMT为添加指令的位置,打开添加指令菜单,选择MoveAbsJ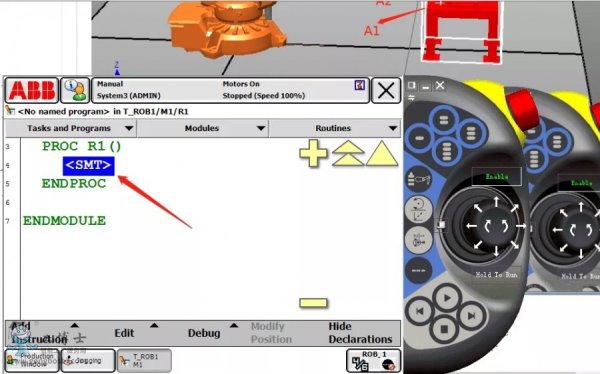
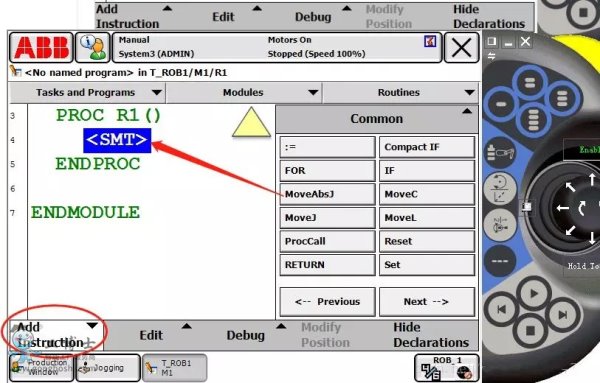
(**位置运动指令MoveAbsJ是机器人的运动使用六个轴和外轴的角度值来定义目标位置数据)指令语法如下:
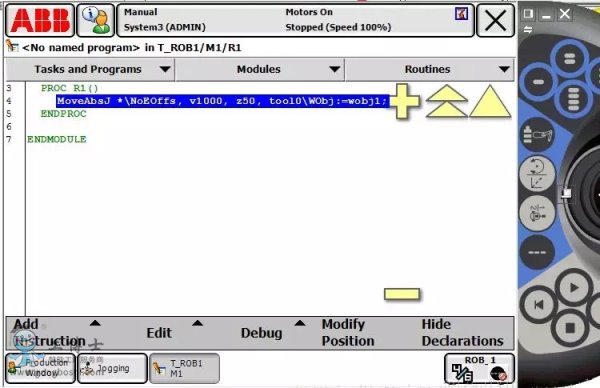
MoveAbsJ jpos1,v1000,z50,\tool1\wobj:=wobj1;
上面jpos1意为目标点位置数据;v1000意为运动速度1000mm/s;z50指转弯区数据;tool1和wobj1分别为工具坐标数据和工件坐标数据。
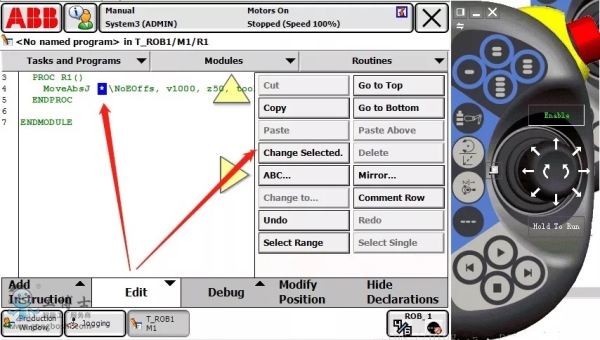
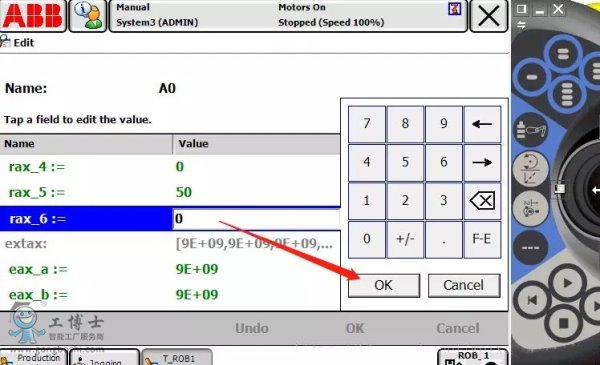
任务要求机器人在A0点时,机器人轴1到轴6的角度分别为0°,-25°,15°,0°,50°,0°,那么需要修改指令中的目标点位置数据,点击*打开编辑菜单,选择更改内容如下图
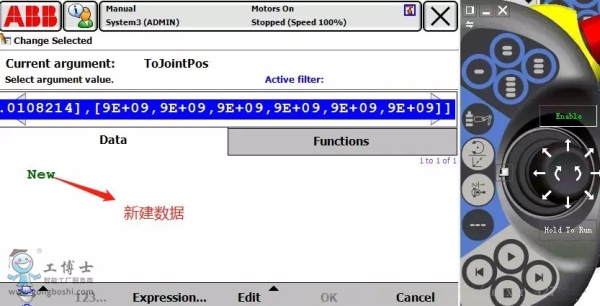
新建数据
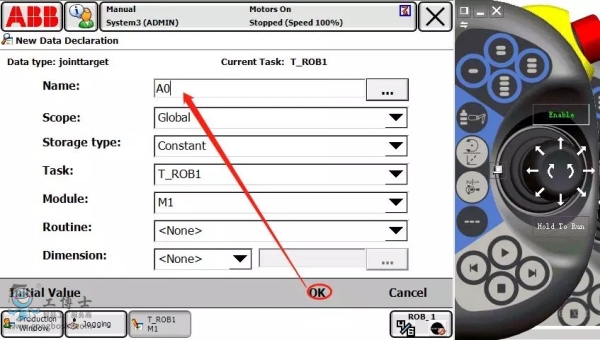
设定数据名称为A0,点击确定
点击A0,打开调试菜单,选择查看值
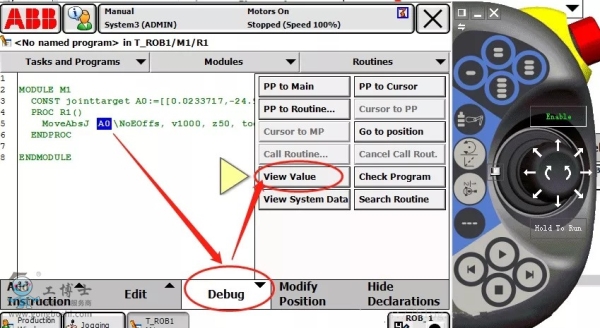
选中值通过右边的小键盘可以修改,修改完后确定
接下来,按照要求,机器人从A0运动到A1点,插入第二条指令,新建程序数据P1,只设定它的名称,位置数据暂时不管
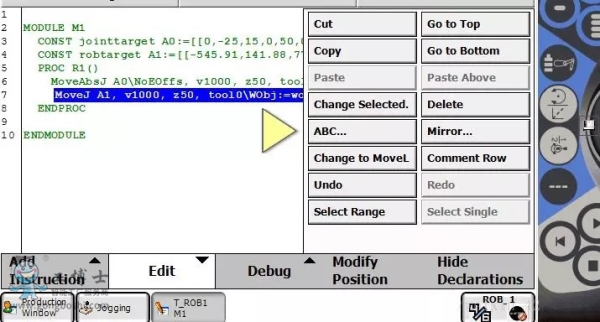
关节运动指令MoveJ是在路径精度要求不高的情况下,机器人的工具中心点TCP从一个位置移动到另一个位置,两个位置之间的路径不一定是直线。
从A1到A2要沿着桌子边沿,那么这段路程必须是直线运动,运动到A2点的运动指令选择线性运动指令MoveL,在程序中插入第三条指令。
新建程序数据A2,只设定名称,位置数据暂时不管
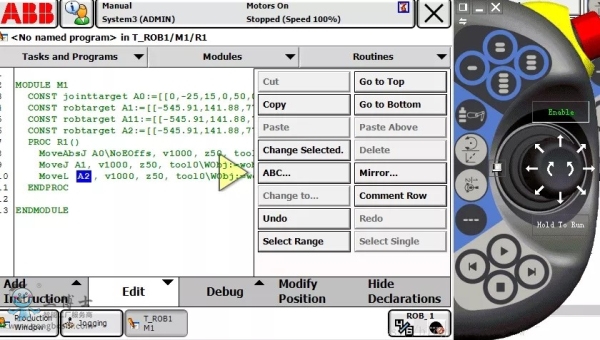
线性运动指令MoveL是机器人的TCP从起点到终点之间的路径始终保持为直线。
从A2到A3与上面类似,从A3回到原点可以复制**条指令
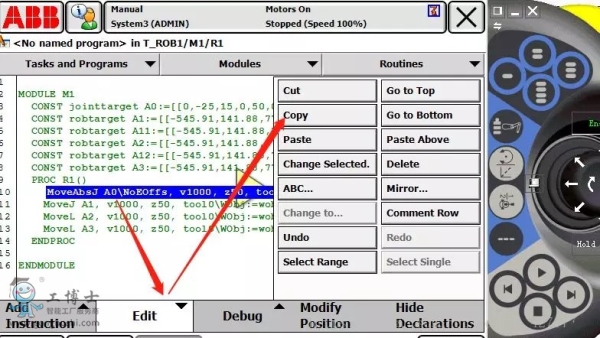
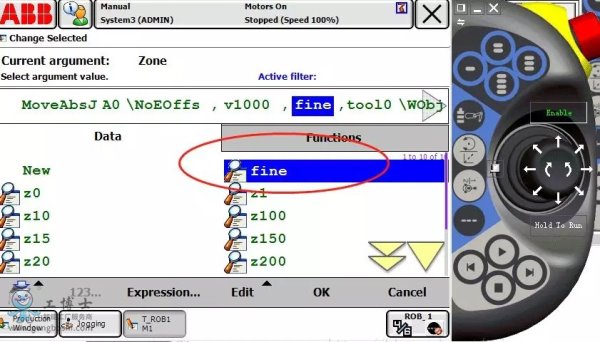
在使用机器人运动指令时,如果是一段路径的*后一个点,指令中的转弯区数据一定要为fine,至此,程序所需指令已经完成。
接下来要用手动视角的方法修改目标点数据:
选择手动操纵,选用合适的动作模式手动操纵机器人运动到A1点,单击MoveJ指令中的A1点,点击修改位置,点击修改完成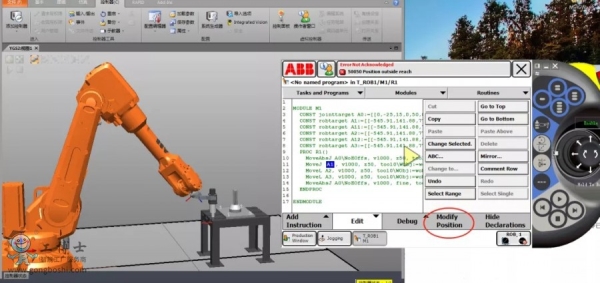
另外两点移动方法类似,过程就不再赘述。这个环节学好了,用机器人写字画画不在话下。




