DD马达怎么接线【详解】
以PLC IO控制安川DD马达为例:
一、CN1管脚定义及硬件接线
1、远点减速开关

管脚15------SENSOR+
管脚14------SENSOR-
根据传感器输出信号电平高低接线
相关参数 Pn634.0---- 2 定义14、15为/DEC原点复归减速开关;
Pn634.1---- 0 定义14、15开关极性,即0有效还是1有效。
2、输入信号用电源输入及SV-ON

管脚47------为输入信号电源输入,固定为DC24V输入
管脚40------为马达激磁使能,在此我们将SVON与ALM-RST共用管脚40
相关参数 Pn50A.1---- 0 定义SVON在管脚40闭合时有效
Pn50B.1---- 9 定义ALM-RST在管脚40 闭合至断开时有效
3、模式选择

管脚41-----为模式选择信号,模式0:执行表数据时;模式1:执行JOG和原点复归时。
相关参数 Pn630.0--- A 定义管脚41断开时为模式0,闭合时为模式1。
4、运行、停止、HOME

管脚42---- 为运行信号
相关参数 Pn630.1--- 2 定义管脚42为RUN/STOP信号,当模式为0时(管脚41断开),闭合时为RUN,断开时为STOP,执行表数据,中断可以重新闭合此信号,恢复原命令;
Pn630.2--- 2 定义管脚42为HOME信号,当模式为1时(管脚41闭合),接通管脚42,为原点复归命令。
Pn630.3--- 8 定义此信号无效
5、通道0~3
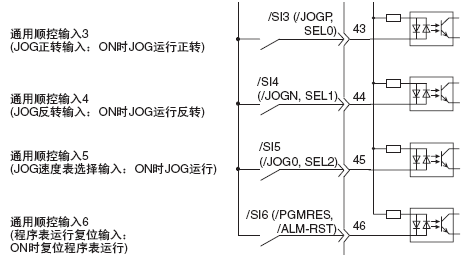
管脚43-~46--为SEL0~3 即表数据通道0~3
相关参数 Pn631.0—3 定义管脚43为SEL0,闭合时有效;
Pn631.1—4 定义管脚44为SEL1,闭合时有效;
Pn631.2—5 定义管脚45为SEL2,闭合时有效;
Pn631.3—6 定义管脚46为SEL3,闭合时有效。
6、输出信号定义—定位完成信号
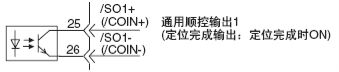
管脚25、26—为马达定位完成信号;
相关参数 Pn50E.0--- 1 定义管脚25、26为马达定位完成信号,在这里建议在马达回零完成时用,不要用在表数据中。
Pn50E.1--- 0 此信号无效
Pn50E.2--- 0此信号无效
7、输出信号定义—伺服准备OK
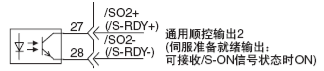
管脚27、28—为马达准备好信号;
相关参数 Pn50E.3--- 2 定义管脚27、28为马达准备OK信号。
8、输出信号定义—马达报警
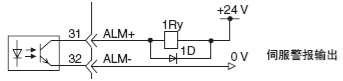
管脚31、32—为伺服报警输出;
9、输出信号公共端
![]()
管脚1--- 固定接0V
10、输出信号定义—可编程输出POUT
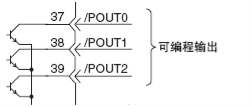
管脚37~39--- 为可编程输出,一般用在表数据中
相关参数 Pn635.0--- 4 定义管脚37 为POUT0
Pn635.1--- 5 定义管脚38 为POUT1
Pn635.2--- 6 定义管脚39 为POUT2
二、执行动作
原点复归说明:
参数设定 Pn642.0—1 定义原点复归方法,在这里定义有/DEC信号且找C相脉冲;根据实际条件可选其他。
Pn643.0—1 定义原点复归方向,这里定义反向原点复归。
Pn644--- 原点复归移动速度,即第一段速度,注意单位为1000指令单位,即设定值*1000是原点复归的实际速度;
Pn646--- 原点复归接近速度,即第二段速度,碰到DEC后找C相脉冲的速度,注意单位为1000指令单位,即设定值*1000是原点复归的实际速度;
Pn648--- 原点复归爬行速度,即第三段速度,找到C相脉冲后定位至最终移动距离的速度,注意单位为1000指令单位,即设定值*1000是原点复归的实际速度;
Pn64A--- 最终移动距离,找到C相后再定位的脉冲数。
Pn636.1—原点复归完成,端子选择。
执行时,先将模式切换为MODE1,否则执行的是表数据。通过判断马达POSRDY原点复归完成,即管脚25、26对应的PLC中的点复位HOME命令。




