焊接机器人的编程技巧及举例说明
焊接机器人是从事焊接(包括切割与喷涂)的工业机器人,是一种多用途的、可重复编程的自动控制操作机,具有三个或更多可编程的轴,用于工业自动化领域。那么焊接机器人的编程步骤是怎样的呢?下面小编为大家简单介绍一下。
焊接机器人的编程技巧:
(1)选择合理的焊接顺序,以减小焊接变形、焊枪行走路径长度来制定焊接顺序。
(2)焊枪空间过渡要求移动轨迹较短、平滑、安全。
(3)优化焊接参数,为了获得最佳的焊接参数,制作工作试件进行焊接试验和工艺评定。
(4)采用合理的变位机位置、焊枪姿态、焊枪相对接头的位置。工件在变位机上固定之后,若焊缝不是理想的位置与角度,就要求编程时不断调整变位机,使得焊接的焊缝按照焊接顺序逐次达到水平位置。同时,要不断调整机器人各轴位置,合理地确定焊枪相对接头的位置、角度与焊丝伸出长度。工件的位置确定之后,焊枪相对接头的位置必须通过编程者的双眼观察,难度较大。这就要求编程者善于总结积累经验。
(5)及时插入清枪程序,编写一定长度的焊接程序后,应及时插入清枪程序,可以防止焊接飞溅堵塞焊接喷嘴和导电嘴,保证焊枪的清洁,提高喷嘴的寿命,确保可靠引弧、减少焊接飞溅。
(6)编制程序一般不能一步到位,要在机器人焊接过程中不断检验和修改程序,调整焊接参数及焊枪姿态等,才会形成一个好程序。
某焊接机器人编程:
一、开机
1、打开控制柜上的电源开关在“ON”状态。
2、将运作模式调到“TEACH”→“示教模式下”
二、焊接程序编辑
1.进入程序编辑状态:
1.1.先在主菜单上选择[程序]一览并打开

1.2.在[程序]的主菜单中选择[新建程序]
1.3.显示新建程序画面后按[选择]键
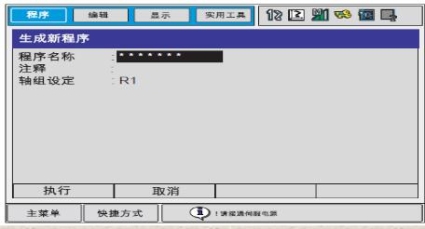
1.4.显示字符画面后输入程序名现以“TEST”为新建
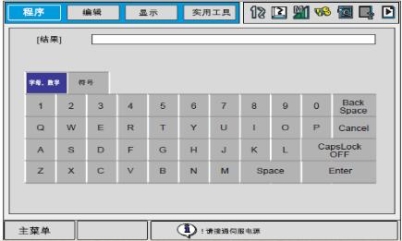
程序名举例说明;
1.5.把光标移到字母“T”、“E”“S”、“T”上按[选择]键选中各个字母;
1.6.按[回车]键进行登录

1.7.把光标移到“执行”上并确认后,程序“TEST”被登录,并且屏幕画面上显示该程序的初始状态“NOP”、“END”
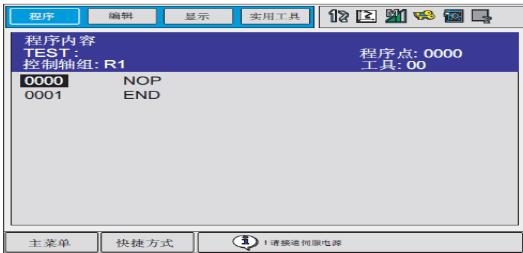
2.编辑机器人要走的轨迹(以机器人焊接直线焊缝为例);把机器人移动到离安全位置,周边环境便于作业的位置,输入程序(001)
2.1.握住安全电源开关,接通伺服电源机器人进入
可动作状态
2.2.用轴操作键将机器人移动到开始位置(开始位置设置作业准备位置)
2.3.按[插补方式]键,把插补方式定为关节插补,输入缓冲显示行中显示关节插补命令,„MOVJ“→”“MOVJ,,VJ=0.78”

2.4.光标放在“00000”处,按[选择]键;

2.5.把光标移动到右边的速度“VJ=**”上,按[转换]键+光标“上下”键,设定再现速度,若设定速度为50%时,则画面显示“→MOVJVJ=50%”,也可以把光标移到右边的速度,„VJ=***‘上按[选择]键后,可以直接在画面上输入要设定的速度,然后按[回车键确认。

2.6.按[回车]键,输入程序点(即行号0001)





