工业机器人四大坐标系全面介绍及解析
工业机器人四大坐标系全面介绍及解析
机器人坐标系的种类
定义:机器人分为机器人本体轴和外部轴。外部轴又分为滑台和上位机等。如无特别说明,机器人轴即指机器人本体的运动轴。对机器人进行轴操作时,可以使用以下几种坐标系(各牌子机器人叫法不一致):
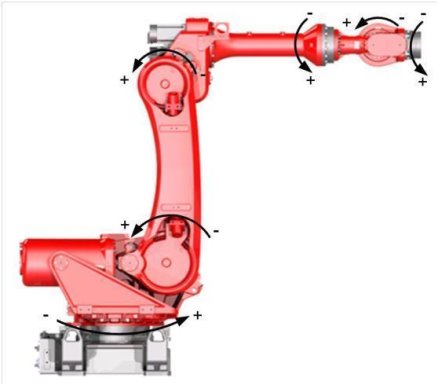
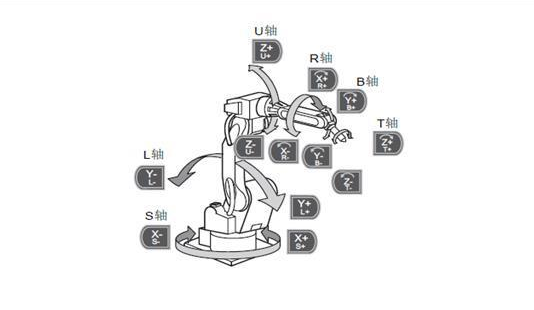
一. 关节坐标系
机器人各轴进行单独动作,称关节坐标系。

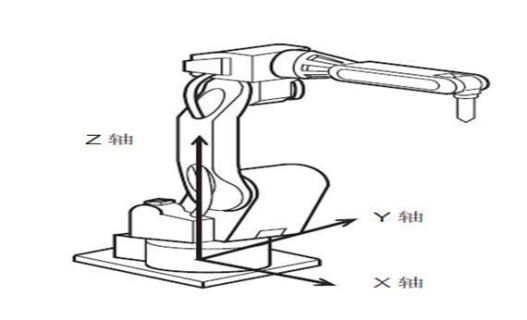
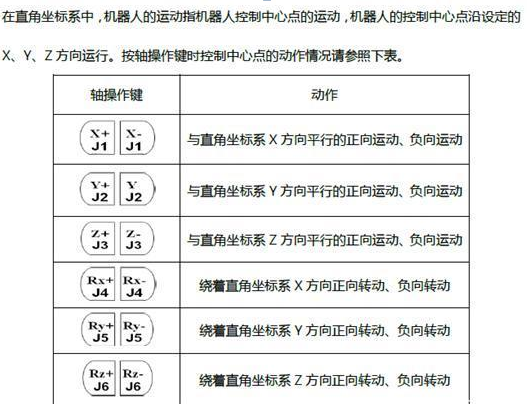
二.直角坐标系
直角坐标系的原点定义在机器人轴轴线上,是与2轴所在水平面的交点。
直角坐标系的方向规定:X轴方向向前,Z轴方向向上,Y轴根据右手定则确定。不管机器人处于什么位置,均可沿设定的X 轴、Y 轴、Z 轴平行移动。
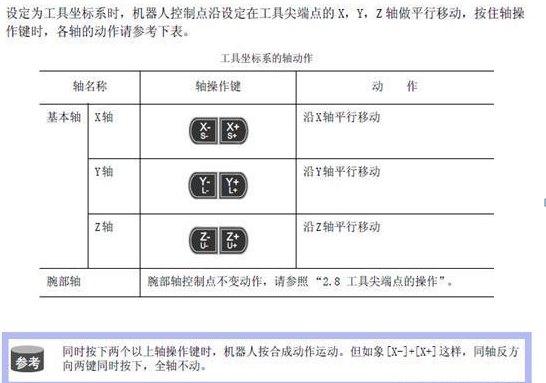
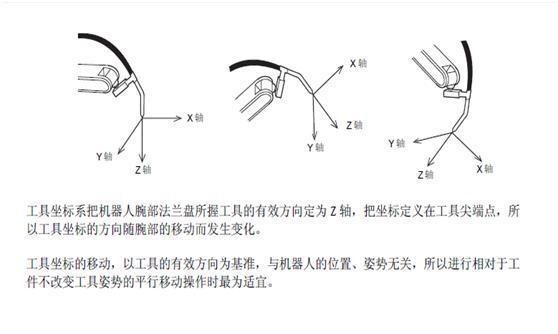
三. 工具坐标系
工具坐标系把机器人腕部法兰盘所持工具的有效方向作为Z 轴,并把坐标定义在工具的尖端点。
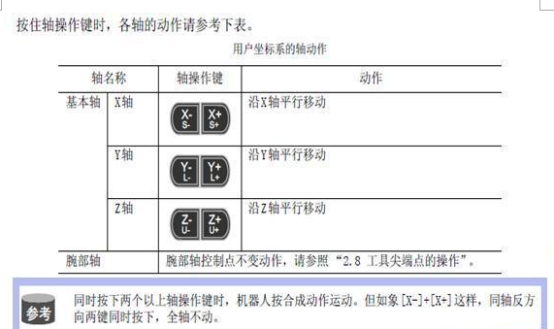
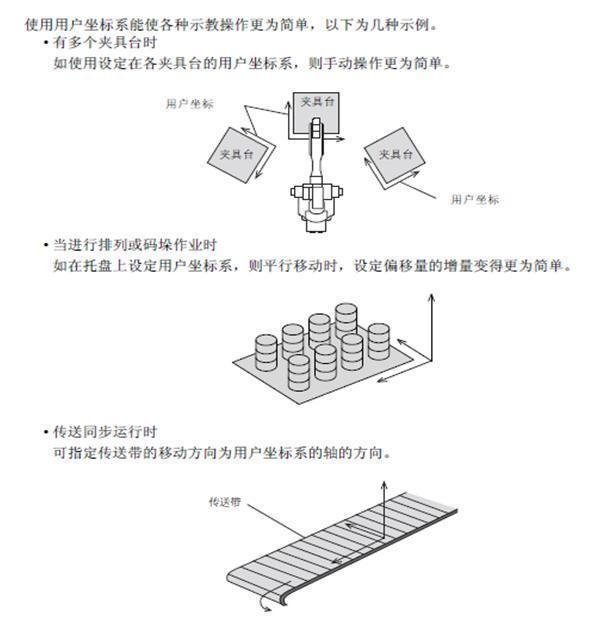
四.用户坐标系
在机器人动作允许范围内的任意位置,设定任意角度的X、Y、Z 轴,用户坐标系一般定义在工件,方向由用户自己定义.
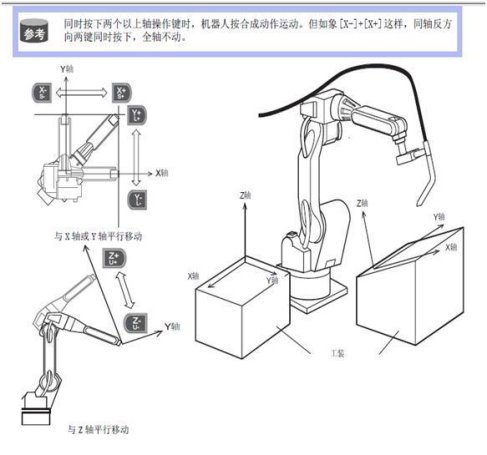
以下是用户坐标的使用范例



热门文章

推荐
热门标签
关注我们

扫码关注我们
了解更多相关信息
服务机械行业22年 - 专业权威积淀,品牌优势传承