机器人奇异点解析【图解】
机器人奇异点解析【图解】
在标准六轴工业机器人运动学系统中,机器人有三个奇异点位置需要区别对徃。它们分别是:顶部奇异点、延伸奇异点、腕部奇异点。奇异点的特性为无法正确的进行规划运动。基于坐标的规划运动无法明确的反向转化为各轴的关节运动。机器人在奇异点附近进行规划运动(直线、圆弧等,不包括关节运动)时会报警停止,所以示教时应尽量避开奇异点或以关节运动通过奇异点。很多机器人都会存在这种奇异点,这现状跟机器人的品牌无关,只和结构有关。
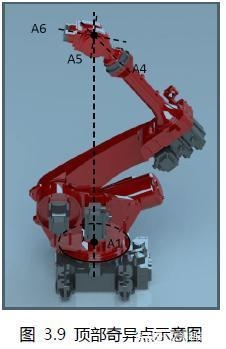
1. 顶部奇异点
腕关节中心点4、5、6轴交点,当其位与一轴轴线上方时机器人处于顶部奇异点:
2. 延伸奇异点
当J2-J3延长线经过腕关节中心点时机器人处与延伸奇异点:

3. 腕部奇异点:
当4轴与6轴平行即5轴关节值为0附近时机器人处与腕部奇异点:

因此,在ABB机器人仿真软件里,ABB的robotstudio,里面的机器人模型,机器人的五轴会是这样的稍微往下倾斜,这么做是为了避开奇异点。



热门文章

推荐
热门标签
关注我们

扫码关注我们
了解更多相关信息
服务机械行业22年 - 专业权威积淀,品牌优势传承