解析工业机器人限位系统(软限位、硬限位、机械限位)
解析工业机器人限位系统(软限位、硬限位、机械限位)
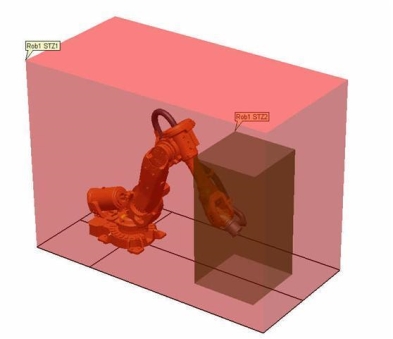
机器人运动范围(限位)
机器人的工作空间,这个词含义比较宽泛,即机器人手臂能够够到的最大工作范围。实际应用中,机器人的工作范围是包含于envelope 最大范围之内的,而且还必须有条件的限制机器人在尽可能小的范围内工作。
机器人的限位限制一般有三重 :软限位、限位开关、机械限位 。
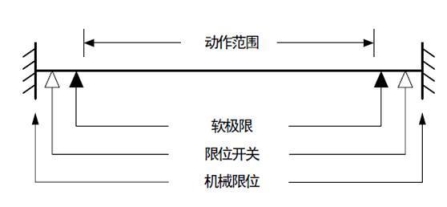
软限位是软件中设定的各轴运动范围限值。了解机器人的运动学原理,就会知道,关节机器人之所以能在空间里准确到达一个位置,依靠的是各个轴分别从零点开始开始旋转特定的角度,从而合成出最终的位置。注意,“零点”这个关键词,意即每个关节开始运动的参考点,即0度。既然机器人可以自己计算每个轴从零点开始转了多少角度,那么自然就可以有一个新的参数:软限位(相对应于硬限位)。可以设定正方向 P 度,负方向 N 度是轴的活动范围,这样,当机器人运动过程中一旦检测到超出这个范围,控制器就让机器人停下来,然后弹出相应错误信息提示超限位了。软限位应该小于机械限位的,这样,当软限位失效后,硬限位就可以继续起作用。机器人运动到该限值时警告,机器手下电,警告可以取消。每个轴都有软限位(下图是各轴运动的软限位)。

2.限位开关(硬限位)是电气硬件上对各轴的位置限制,通常是类似行程开关。机器人运动到该位置触发开关后报警下电,不能使用取消键取消,如果要取消需要在执行开关中将硬限位功能关闭。并不是每个轴都有限位开关。
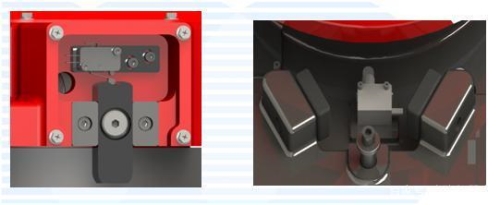
3.机械限位是机械上的位置限制,通常使用橡胶块等防止硬冲击。比如说限制第一轴旋转角度的机械挡块,如果超出限定位置,必然会被阻挡。使用机械限位的好处是可以在物理空间里准确定位,缺点是如果要达到很精确的定位,机构会变得很复杂。也无法自由调整设定,并不是每个轴都有机械限位



热门文章

推荐
热门标签
关注我们

扫码关注我们
了解更多相关信息
服务机械行业22年 - 专业权威积淀,品牌优势传承