fanuc机器人指令一览表【附图】
程序编辑界面,在编辑(EDCMD)中有一系列的功能选项,本文重点对“变更编号”、“取消”及“改为备注”三个功能做详细介绍。
- 变更编号(Renumber)
该选项的功能作用是:以升序方式,从光标所在行起,自上而下赋予程序中位置变量新的位置编号,使程序中的位置编号更加整齐。
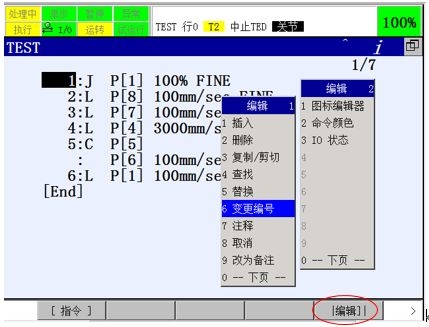
图1
示教编程中,由于经常需要对示教位置点执行插入或删除操作,位置编号在程序中会变得零乱无序(如图2)。
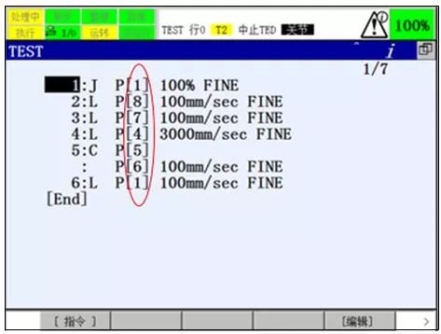
图2
通过变更编号功能,可使位置编号在程序中依序排列(如图3)。
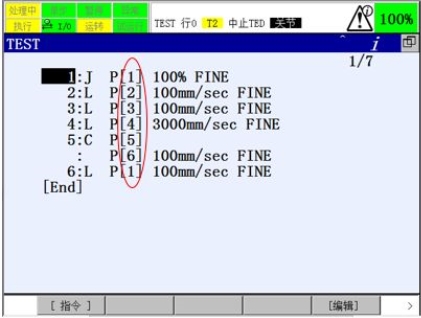
图3
注意:
1、变更编号功能仅对编号顺序进行调整,不改变原程序轨迹。
2、变更编号功能只对位置变量P[i]有效,对位置寄存器PR[i]无效。
具体操作步骤:
将光标移至程序首行后
①选择F5编辑命令;
②选择“变更编号”选项;
③选择F4“是”
(如图4、图5所示)。
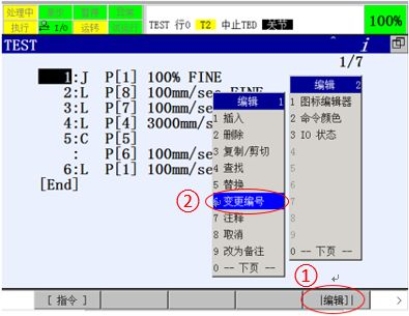
图4
备注:由于行1与行6中位置变量相同,都为P[1]。所以,变更编号后两者编号保持一致。
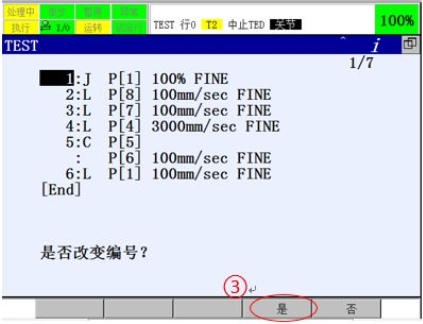
图5
2.取消(Undo)
该选项的功能作用是:可以撤销指令的更改、行插入、行删除等程序编辑操作。
注意:该功能只能撤销上一步操作,不能撤销多次操作。
下文以行删除为例对该功能进行说明。
原程序如图6所示:
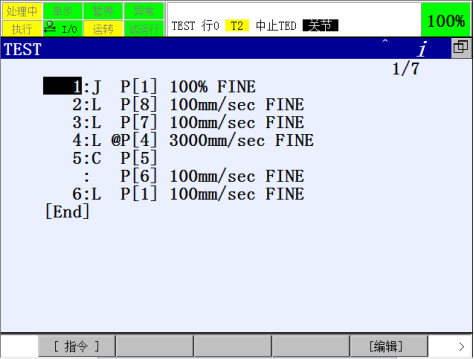
图6
在原程序中删除1-3行后,程序如图7所示:

图7
通过使用取消(Undo)功能,能够撤销删除操作,恢复已删除行。
具体操作步骤:
①选择F5编辑命令;
②选择“取消”;
③选择F4“是”
(如图8、图9所示)。
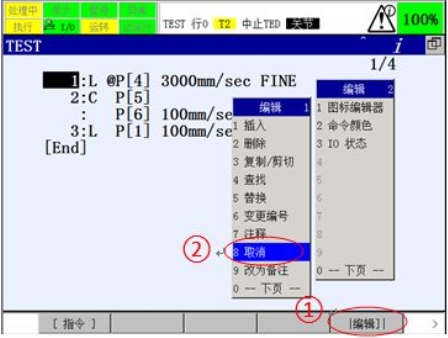
图8
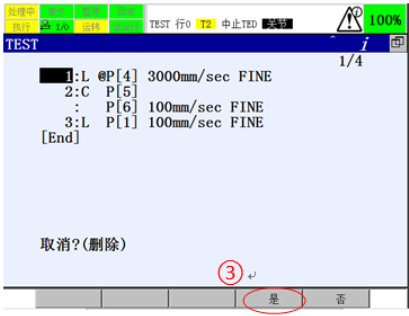
图9
取消后,程序如图10所示。

图10
3.改为备注(Remark)
该选项的功能作用是:通过将程序中的单行或多行指令改为备注,可以在程序运行中不执行该指令。原程序如图11,
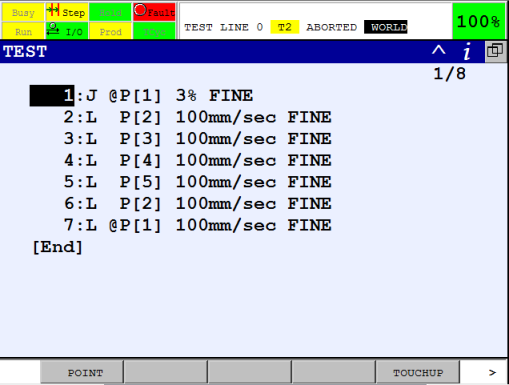
图11
该程序对应机器人轨迹如图12,
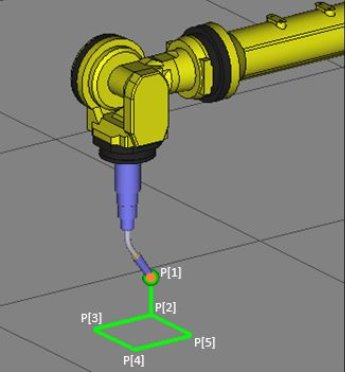
图12
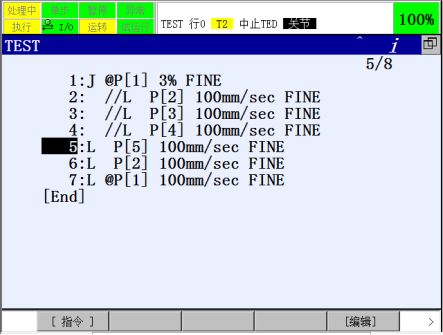
将原程序2-4行改为备注后,在行的开头会显示“//”。改为备注的指令在程序运行中相当于被屏蔽,不会被执行。将2-4行改为备注后,程序如图13,
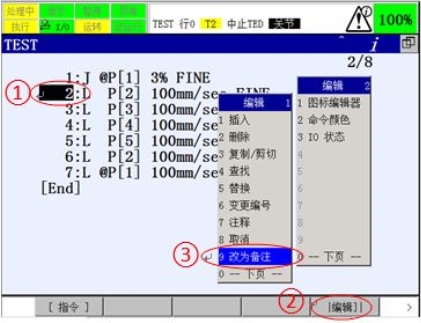
图13
改为备注后的程序执行效果如图14,行2至行4指令内容保留,但不被执行。
图14
具体操作步骤:
①将光标移至需要改为备注的行号位置;
②选择F5编辑命令;
③选择“改为备注”选项(如图15);
④根据提示,下移光标选中目标对象;
⑤选择F4“改为备注”(如图16)。
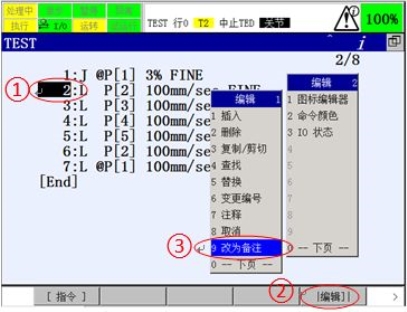
图15

图16
备注:若要取消备注,可按照相同操作步骤选择取消备注。
扩展资料:
发那科机器人的正确操作方法及步骤:
1、通电
1)将操作者面板上的断路器置于ON
2)接通电源前,检查工作区域包括机器人、控制器等。检查所有的安全设备是否正常。
3)将操作者面板上的电源开关置于ON
2、关电
1)通过操作者面板上的暂停按钮停止机器人
2)将操作者面板上的电源开关置于OFF
3)操作者面板上的断路器置于OFF

注意:如果有外部设备诸如打印机、软盘驱动器、视觉系统等和机器人相连,在关电前,要首先将这些外部设备关掉,以免损坏。
3、示教模式
关节坐标示教(Joint)
通过TP上相应的键转动机器人的各个轴示教
直角坐标示教(XYZ)
沿着笛卡儿坐标系的轴直线移动机器人,分两种坐标系:
1)通用坐标系(World):机器人缺省的坐标系
2)用户坐标系(User):用户自定义的坐标系
工具坐标示教(Tool)
沿着当前工具坐标系直线移动机器人。工具坐标系是匹配在工具方向上的笛卡儿坐标系
设置示教模式,按TP上的COORD键进行选择。
屏幕显示
JOINT→JOG→TOOL→USER→JOINT
状态指示灯
JOINT→XYZ→TOOL→XYZ→JOINT
4、设置示教速度
按TP上的示教速度键进行设置。
示教速度键
VFINE→FINE→1%→5%→50%→100%VFINE到5%之间,每按一下,改变1%,5%到100%之间,每按一下,改变5%
SHIFT键+示教速度键
VFINE→FINE→1%→5%→50%→100%
注意:
开始的时候,示教速度尽可能的低一些,高速度示教,有可能带来危险。
1)按下Deadman 开关,将TP开关置于ON
2)按下SHIFT键的同时,按示教键开始机器人示教。SHIFT键和示教键的任何一个松开,机器人就会停止运动。




